Contact :
infos@sticef.org
|

Les métaphores conceptuelles : un premier pas vers
une éducation critique à la robotique
 Fanny BORAITA (IRDENA, Université de Namur), Anne-Sophie COLLARD (NADI,
Université de Namur), Julie HENRY (NADI, Université de
Namur)1 Fanny BORAITA (IRDENA, Université de Namur), Anne-Sophie COLLARD (NADI,
Université de Namur), Julie HENRY (NADI, Université de
Namur)1

|
RÉSUMÉ : Deux
activités d’éducation à la robotique font
l’objet d’une étude exploratoire : la première
confronte des robots pédagogiques à 140 enfants (3-10 ans) et la
deuxième permet à 13 adolescents (8-15 ans) de construire leur
robot. Le focus est mis sur les métaphores utilisées
spontanément par les formateurs et apprenants. Leur exploration vise
à approfondir la compréhension des interactions entre formateurs,
apprenants et robots afin de réfléchir à des
problématiques à aborder dans une éducation critique
à la technologie.
MOTS CLÉS : Éducation
critique à la technologie, éducation à la robotique,
représentations, analyse du discours, étude exploratoire.
|
Conceptual metaphors: a first step towards a critical robotics education. |
|
|
ABSTRACT : Two
robotics education activities are the subject of an exploratory study: the first
one confronts 140 children (3-10 years old) with educational robots and the
second one allows 13 teenagers (8-15 years old) to build their robot. The focus
is on the metaphors used spontaneously by the trainers and learners. Their
exploration aims at deepening the understanding of the interactions between
trainers, learners and robots in order to reflect on issues to be addressed in a
critical education to technology
KEYWORDS : Critical
technology education, robot literacy, robot education, representations, speech
analysis, exploratory study. |
1. Introduction
L'enseignement du code et
l’éducation à la robotique dès le plus jeune
âge sont intégrés, ou en cours d'intégration, dans
les systèmes éducatifs partout dans le monde (Bers et al., 2014), (Malvezzi, 2021).
Cependant, en Belgique francophone, l'informatique, y compris la pensée
informatique, est jusqu’ici presque absente de l'enseignement obligatoire,
notamment pour les élèves de 5 à 18 ans (Henry et Joris, 2016), (Joris et Henry, 2014).
Le manque de formation des enseignants (Henry et Joris, 2013) est souvent cité comme raison à cette absence. Pourtant, dans un
avenir proche, ils seront amenés non seulement à intégrer
des outils numériques dans leurs classes, mais aussi à enseigner
des compétences numériques (Henry et Smal, 2018).
La promotion de cet enseignement est largement véhiculée par
les médias et soutenue au niveau politique, à travers
différents plans de développement des secteurs Technologies de
l’information et de la communication (TIC) et des plans de financement
d’outils numériques dans les écoles. En outre, les
ressources se multiplient sur Internet : témoignages, vidéos,
activités clés-sur-porte (testées ou non en classe),
conseils en tous genres, comparaisons techniques de robots, etc. Des
activités éducatives intégrant la robotique sont mises en
place dans certains établissements scolaires, ainsi que dans des lieux
d'éducation non formelle. Cependant, les aspects didactiques,
l’évaluation des compétences acquises grâce à
ce type d’activités et les articulations interdisciplinaires (Malinverni et al., 2021) ont été peu questionnés et problématisés.
L’introduction à la robotique dans l’enseignement est souvent
limitée à ses aspects purement techniques (Alimisis et Kynigos, 2009), (Ferrada-Ferrada et al., 2020), (Kubilinskiené et al., 2017), (Rusk et al., 2008), (Stone et Farkhatdinov, 2017) sans que soit pris en compte ses liens étroits avec la
société (Riek et Howard, 2014), (Sullins, 2015), (Zawieska, 2020).
L’étude exploratoire décrite dans cet article vise
à participer à la construction d’un modèle
d’éducation critique à la robotique, incluant les dimensions
techniques, sémiotiques et sociales de l’objet
technologique/informatique (Henry et al., 2018).
La dimension sociale réfère notamment aux moyens de nouer une
relation appropriée avec les robots intelligents (Suto, 2013). Ces
relations peuvent être profondes, les enfants considérant les
robots comme des entités sociales (Fior et al., 2010), (Fridin et Belokopytov, 2014), (Kahn et al., 2012), (Scopelliti et al., 2004).
La compréhension des concepts numériques et de leurs enjeux
sociétaux est particulièrement dépendante des discours
tenus dans les activités d’éducation au numérique.
Des métaphores y sont utilisées de manière
spontanée, révélatrices du mode de pensée et des
conceptions (Levin et Wagner, 2006), (Moser, 2000). Ces
métaphores forgent les représentations des environnements
numériques (Manches et al., 2021).
En explorant les métaphores spontanées présentes dans les
discours tenus lors d’activités de formation à la robotique,
l’étude cherche à approfondir la compréhension des
interactions entre les apprenants, les formateurs et le robot et à en
appréhender les enjeux en termes éducatifs. Deux activités
de robotique respectivement destinées à des enfants et à
des adolescents ont constitué les cas d’étude. Les discours
des élèves ont été analysés pour identifier
les métaphores spontanément mobilisées à la fois par
les formateurs et par les apprenants, mais également pour
déterminer le rôle qu’elles jouent au sein des
activités.
La principale contribution de cette étude est, à travers
l’exploration des métaphores utilisées spontanément
et la définition de leurs rôles, l’identification et la
formulation de problématiques à aborder dans le cadre d’une
éducation critique à la technologie, et plus spécifiquement
à la robotique.
2. Travaux antérieurs
2.1. Les robots
Selon Lambert, un robot est « un
système formé par un réseau complexe et interactif de
capteurs, de processeurs et d’actionneurs, agissant dans un environnement
de manière partiellement ou totalement indépendante de
l’humain » qui en fait l’usage (Lambert, 2019, p. 10).
Il distingue deux types de robots :
- les robots mécatroniques sont des constructions
complexes d'éléments mécaniques et
électroniques,
- les robots électroniques, appelés bots,
agissent sur les réseaux sociaux, les e-mails ou les bases de
données.
De plus, le degré d'autonomie des robots est variable :
- les robots peuvent être des systèmes
automatiques. Par exemple, des robots dont les instructions sont
ordonnées a priori par le programmeur.
- les robots peuvent être des robots autonomes. Par
exemple, des robots dont l'ensemble des comportements possibles n'est pas
entièrement ordonné par le programmeur.
L’étude présentée ici se concentre sur des
activités impliquant des robots qui sont à la fois des robots
mécatroniques, tangibles, dont les actions peuvent être directement
observées à travers leurs mouvements, et des robots automatiques
« opérant dans des environnements parfaitement
déterminés et connus, dont les actions, totalement
prévisibles, sont régies par les instructions strictes de leur
logiciel, mettant en œuvre les intentions des programmeurs » (Lambert, 2019, p. 12).
Introduits dans l'enseignement, les robots sont souvent associés
à des technologies qui favorisent l'apprentissage (Gaudiello et Zibetti, 2013), (Gaudiello et Zibetti, 2016).
On parle de robotique éducative (Alimisis, 2013), (Romero et Sanabria, 2017).
Les robots sont utilisés comme outils numériques à des fins
pédagogiques dans diverses matières, notamment en
mathématiques, en sciences et en sciences de l'ingénieur, mais
aussi dans des matières plus éloignées (Benitti, 2012), (Felicia et Sharif, 2014).
Ils favorisent également le développement de certaines
compétences métacognitives (soft skills) (Eguchi, 2014), (Gaudiello et Zibetti, 2013), (Romero et Sanabria, 2017).
De plus, différentes études montrent qu'ils encouragent la
motivation des enfants à apprendre, notamment par le biais de la
narration d'histoires (Benitti, 2012), (Kory et Breazeal, 2014) ou l'utilisation de la compétition (Bazyley et al., 2014), (Ma et Williams, 2013), (Sklar et al., 2002).
Mais le robot n'est pas seulement un moyen d'apprentissage, il peut aussi
être l'objet d'un apprentissage. On parle alors d’éducation
à la robotique. Trois orientations peuvent être données
à cette éducation (Henry et al., 2018) :
les robots peuvent être utilisés (1) pour initier les apprenants
aux concepts de l'informatique et de la pensée informatique dans
l’optique d’une formation fondamentale, (2) pour développer
les secteurs des TIC/STEM2 par une
formation spécifique qui vise à développer une expertise ou
(3) pour former tous citoyens à la « culture
numérique ». L'approche proposée dans cet article
s’inscrit dans cette troisième orientation qui considère
l’éducation à la robotique comme faisant partie d'une
éducation critique à la technologique, discutant le
« rôle de la technologie dans les sociétés et
la vie quotidienne des gens » (Saariketo, 2014).
Gaudiello et Zibetti (Gaudiello et Zibetti, 2013) distinguent deux types de robots utilisés dans
l'éducation :
- Les « robots à utiliser », qui
sont souvent de type humanoïde (ou animal). Ce sont des
« boîtes noires ». Leurs composants ne sont ni
manipulables ni observables. Leur fonctionnement technique interne n'est pas
directement compréhensible. Ces robots favorisent des perceptions et des
interactions avec la machine qui semblent proches de celles qu’on peut
avoir avec des êtres vivants. Toutefois, ils peuvent conduire à
certaines frustrations dues aux capacités d'interaction en
réalité limitées des robots avec les êtres vivants (Kerepesi et al., 2006), (Melson et al., 2009), (Robinson et al., 2013).
- Les « robots en kit à
construire » sont des « robots avec lesquels
penser ». Leurs composants sont observables et manipulables. Leur
fonctionnement technique interne est plus facilement appréhendable. Ces
robots sont plus favorables à l'éducation des enfants, leur
donnant « la possibilité de devenir un auteur plutôt
qu'un consommateur de technologie » (Gaudiello et Zibetti, 2013).
L’étude décrite ici se concentre sur des activités
impliquant les deux types de robots.
2.2. Les métaphores conceptuelles
Selon la théorie de la métaphore conceptuelle (Lakoff et Johnson, 1980),
les métaphores utilisées naturellement dans le langage ne sont pas
des artifices linguistiques. Elles sont des indicateurs de nos
représentations mentales. Elles révèlent des processus
cognitifs qui permettent de se représenter le monde. « Notre
système conceptuel ordinaire, qui nous sert à penser et à
agir, est de nature fondamentalement métaphorique » (Lakoff et Johnson, 1980).
Les projections métaphoriques permettent de comprendre et de vivre
quelque chose, souvent plus abstrait, en termes de quelque chose d'autre, plus
concret ou physique. La projection métaphorique n'est pas
complète, en ce sens que le concept visé ne devient pas tout
à fait le concept métaphorique. Elle conduit cependant à se
concentrer sur certains aspects du concept visé, mis en évidence
par le concept métaphorique mobilisé, tout en masquant les autres
aspects. Par exemple, dans la phrase « vos arguments sont
indéfendables », la discussion est considérée en
partie comme une guerre. La métaphore utilisée met en
évidence des aspects de la discussion qui sont similaires à la
guerre, comme le fait de devoir se défendre, tout en masquant d'autres
aspects présents dans la discussion comme la coopération, entre
autres.
Les métaphores spatiales sont des processus cognitifs fondamentaux qui
permettent de développer une compréhension fondée sur
l’expérience physique et directe de l’environnement ou des
objets. Par exemple, le bonheur est évoqué en termes de
verticalité : plus de bonheur est un sommet. Les métaphores
spatiales sont utilisées sans s'en rendre compte et c'est pourquoi, en
tant qu'observateur, il est difficile de les identifier au premier coup
d'œil. À côté de ces métaphores qui sont
fondamentales mais peu riches, Lakoff et Johnson (Lakoff et Johnson, 1980) identifient les métaphores structurelles. Elles mobilisent un concept
métaphorique structurellement plus complexe et conduisent à des
compréhensions particulières des domaines conceptuels
visés, comme la guerre dans la métaphore « la discussion
est la guerre ».
Plusieurs travaux ont mis en évidence l'utilisation spontanée
de métaphores pour représenter les environnements
numériques, en particulier les métaphores spatiales (Collard et Fastrez, 2010), (Collard et al., 2012),
mais aussi des métaphores structurelles qui rendent ces environnements
concrets ou physiques (Barr et al., 2003), (Madsen, 2000).
Ces métaphores ne sont pas neutres au niveau des représentations
et des interactions avec les environnements numériques qu’elles
impliquent. Collard (Collard, 2012) a notamment montré leur influence sur la compréhension et les
comportements de navigation des utilisateurs.
3. Méthodologie, contextes et objectif de recherche
Les études de cas multiples permettent de
comprendre un phénomène contemporain en profondeur et dans son
contexte réel (Alexandre, 2013), (Yin, 2009). Dans le
cas de cette étude, deux cas constituent des lieux d’observation
différents : un premier cas mobilisant trois « robots
à utiliser » dans un contexte scolaire (étude de cas
1) ; le second se basant sur un « robot en kit »
à construire lors d’une activité extra-scolaire
(étude de cas 2). Tous les robots sont mécatroniques et
automatiques.
3.1. Contexte 1 : étude de cas 1
Dans la première étude de cas, une séquence de quatre
animations de 40 minutes et une évaluation formative ont
été mises en place auprès d’enfants âgés
de 3 à 10 ans, issus de la même école. Au total, 140 enfants
de sept classes différentes (une par niveau) ont participé
à l'étude. Les formateurs étaient deux chercheuses, une
informaticienne et une pédagogue. Les enseignants habituellement en
charge des enfants participaient en tant qu’observateurs.
La première animation consistait à familiariser les enfants
avec le matériel informatique et à déshumaniser le robot.
Les enfants ont d’abord dessiné leurs représentations d'un
robot et d'un ordinateur. Ensuite, ils ont découvert le matériel
informatique en construisant leur propre ordinateur, en papier (matériel
disponible sur Hello Ruby : http://www.helloruby.com/play/2)
(Figure 1). Enfin, ils ont manipulé de vrais composants
électroniques.

Figure 1 • Construire son propre
ordinateur
Dans les trois animations suivantes, les robots Bee-bot, Blue-bot, et/ou
Ozobot ont été utilisés, selon l'âge des enfants. Ces
robots ont été sélectionnés pour leurs
différents modes d'interaction (boutons, barre de programmation ou
application mobile sur une tablette) et leur popularité dans
l'enseignement.
La deuxième animation visait à apprendre le langage de
programmation des trois robots, sachant que Bee-bot et Blue-Bot
réagissent au même langage. Il s'agit d'une activité
débranchée. Les enfants disposaient d'un jeu de cartes (Figure 2)
qui reproduisait les instructions associées aux différents robots.
Un enfant jouait le rôle d'un robot dans un labyrinthe géant. Les
autres ont écrit, avec les cartes, un programme permettant de faire
sortir le robot du labyrinthe. Dans un premier temps, la solution a
été codée avec le langage du robot Bee-Bot. Une fois
vérifiée, elle a été traduite dans la langue du
robot Ozobot.

Figure 2 • Un jeu de cartes pour
programmer
L'objectif des troisièmes et quatrièmes animations était
d'amener les enfants à écrire un programme, à le tester en
programmant le robot et à le corriger et/ou l'optimiser (en utilisant les
concepts de programmation de variable et de boucle). Cet exercice a
été reproduit deux fois (2 x 40 minutes) afin que les enfants
puissent manipuler deux robots possédant des langages de programmation
différents.
Plusieurs labyrinthes ont été proposés (Figure 3). Les
enfants ont écrit des programmes pour faire bouger les robots dans ces
labyrinthes.
La séquence des animations s'est terminée par une
évaluation formative. Individuellement, les enfants ont fait des dessins
d'un robot et d'un ordinateur pour les comparer avec leurs
représentations initiales. Ils ont également dû corriger sur
papier un programme permettant au robot de sortir d'un labyrinthe donné.
Ensuite, par groupe de trois, les enfants ont discuté de leurs
productions, mais aussi de leur compréhension des concepts de base de la
programmation (variable et boucle) avec un formateur. Enfin, un
débriefing avec les enseignants a également été
organisé pour réfléchir sur le matériel
utilisé, les activités mises en place et pour qu’ils
expriment leur ressenti par rapport aux enfants.
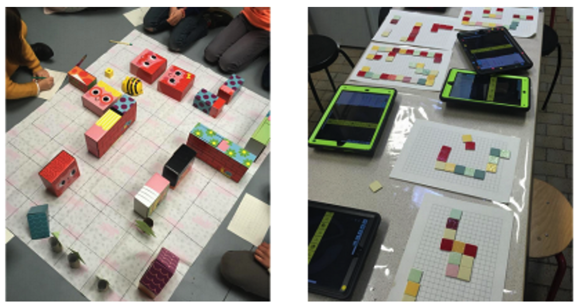
Figure 3 • Programmer les robots
3.2. Contexte 2 : étude de cas 2
La deuxième étude de cas consiste en une activité
d'initiation à la robotique réalisée dans le cadre d'un
stage de vacances pour enfants et adolescents. Cinq enfants âgés de
8 à 12 ans et six adolescents de 12 à 15 ans ont participé
à cette activité sur cinq demi-journées
(complétées par un apprentissage des langues). Le formateur
était un ingénieur en robotique.
Les objectifs de l'activité étaient de concevoir, construire et
programmer un « robot en kit » (conçu par le
formateur). Deux niveaux ont été proposés en fonction de
l'âge des participants :
- les enfants devaient programmer le robot pour qu'il se
déplace dans un circuit, en interaction avec son environnement,
- les adolescents devaient programmer le robot pour qu'il forme un
dessin de leur choix sur une feuille de papier à l'aide d'un feutre.
D'abord, les participants ont dessiné les éléments du
robot (Figure 4) sur le logiciel de conception 3D Tinkercad (https://www.tinkercad.com/). Ils ont
ensuite imprimé ces éléments via une imprimante 3D.
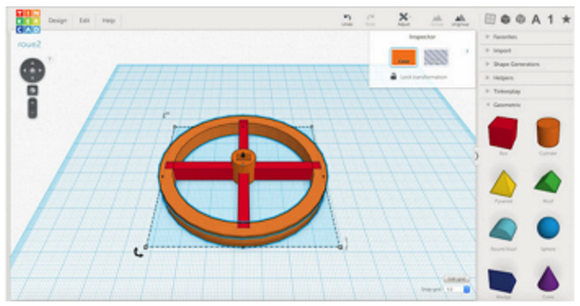
Figure 4 • Concevoir le robot
Ensuite, les participants ont assemblé les différentes
pièces imprimées, une carte Arduino et divers capteurs pour
construire le robot (Figure 5). Enfin, ils ont programmé le robot
conçu via l'application Blockly@rduino (http://www.techmania.fr/BlocklyDuino/).
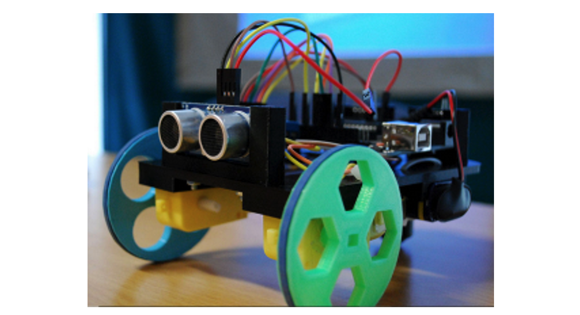
Figure 5 • Concevoir le robot
3.3. Objectif de recherche
Cette étude vise à identifier, suivant une démarche
qualitative, les différentes représentations du robot, et plus
largement de la machine et de ses composants, que les apprenants et les
formateurs mobilisent dans ces deux activités d'éducation à
la robotique. Plus précisément, elle vise à identifier les
métaphores conceptuelles, spatiales et structurelles, qui sont
observables dans le langage des apprenants et des formateurs et à
analyser le rôle de ces métaphores au cours de
l’activité. En explorant ces métaphores, l'étude
cherche à approfondir la compréhension des interactions entre les
apprenants, les formateurs et le robot et à en appréhender les
enjeux en termes éducatifs.
3.4. Collection des données
Dans l'étude de cas 1, toutes les activités, ainsi que les
discussions menées lors de l'évaluation formative, ont
été filmées pour capturer les interactions des enfants
(entre eux, avec le formateur, avec le matériel mis à leur
disposition et/ou le robot) et permettre aux chercheurs d’écouter
leurs verbalisations.
Pour l'étude de cas 2, des données ont été
recueillies auprès des deux groupes de participants (enfants et
adolescents) pendant deux jours par observation ethnographique. L’ensemble
des interactions ont été consignées dans un carnet de notes
par le chercheur dans sa position d’observateur externe.
3.5. Analyse des données
Les métaphores utilisées dans les discours des formateurs et
des apprenants, ainsi que dans leurs interactions entre eux et avec la machine,
ont été identifiées en s’inspirant de la
méthode « metaphor identification procedure » (MIP) (Pragglejaz Group, 2007).
Il s’agit, pour commencer, de cerner le sens général du
discours soumis à l’analyse, à savoir ici, le contexte des
activités éducatives dans lesquelles les discours prennent place.
Ensuite, la méthode vise à identifier les unités lexicales
qui feront l’objet de l’analyse. Nous nous sommes centrées
sur les unités lexicales portant sur les technologies manipulées,
c’est-à-dire l’ordinateur, ses composants, le robot et
l’imprimante 3D (pour le second cas d’étude). La
dernière étape consiste à appliquer une grille en trois
points à chaque unité lexicale pour identifier la présence
d’un sens métaphorique. Premièrement, le sens de
l’unité lexicale est identifié dans le contexte du discours,
c’est-à-dire, pour le cas qui nous concerne, relativement aux
technologies utilisées dans les deux activités éducatives.
Deuxièmement, il s’agit de déterminer si
l’unité lexicale peut prendre un sens plus fondamental dans
d’autres contextes que celui du discours analysé. Les sens plus
fondamentaux sont plus concrets, relèvent d’une action physique,
sont plus précis, ou plus anciens. Par exemple, les capteurs à
l’avant du robot sont considérés comme « des
yeux ». Pour les enfants, les « yeux » sont plus
concrets et possèdent un sens plus ancien et bien plus connu que celui de
capteur. Troisièmement, pour identifier la présence d’une
métaphore, il faut que le sens en contexte analysé contraste avec
ce sens plus fondamental mais peut être compris en le comparant à
celui-ci. Si c’est le cas, il s’agit d’une métaphore.
Dans l’exemple précédent, les capteurs ne sont pas des yeux
à proprement parler, mais leur fonctionnement peut être
comparé à celui des yeux sous certains aspects. Pour terminer et
afin de consolider les analyses, les métaphores identifiées ont
fait l’objet de discussions au sein de l’équipe de recherche.
4. Résultats
4.1. Les rôles
L'analyse du discours des formateurs et des
apprenants a permis, dans un premier temps, de classer les métaphores
utilisées selon le rôle qu'elles jouent dans le discours. Trois
rôles ont été identifiés :
- « La métaphore qui aide à
comprendre » : ce premier rôle consiste à vulgariser
certains concepts informatiques ou électroniques et à comprendre
le fonctionnement de l'ordinateur, du robot ou de ses composants.
- « La métaphore qui rend
tangible » : ce deuxième rôle consiste à
rendre concrets certains concepts abstraits et à mettre en relation
certaines fonctions ou certaines interactions de la machine avec
l'expérience que nous avons de notre environnement physique ou
social.
- « La métaphore qui sert
d’accroche » : ce troisième rôle participe
à la construction d'une atmosphère ludique, affective et
imaginaire, et intervient au niveau des relations
« sociales » entre les apprenants, les formateurs et le
robot.
Ces rôles ne sont pas exclusifs les uns des autres : une
même métaphore peut assumer plusieurs rôles à la fois.
Cependant, dans un souci de clarté et de lisibilité des
résultats, les métaphores utilisées dans le langage des
formateurs et des apprenants sont classées en fonction des trois
rôles identifiés.
Dans les extraits des discours, le style gras met l'accent sur les
unités lexicales relatives à la métaphore, celles qui
justifient sa catégorisation dans un rôle.
4.1.1. La métaphore qui aide à comprendre
4.1.1.1. Dans le
discours du formateur
Dans l'étude de cas 1, les formateurs ont utilisé la
métaphore pour aider les enfants à comprendre les composants d'un
ordinateur. Par exemple, pour expliquer ce qu'est la mémoire vive, ils
utilisent la métaphore du « livreur qui relève l'information du disque dur et l'apporte au
processeur ». La métaphore de l’armoire est
utilisée pour expliquer ce qu'est le disque dur :
« c'est comme une armoire avec beaucoup de tiroirs ».
Dans les activités de programmation, les métaphores sont
également utilisées par les formateurs pour vulgariser les
instructions. Par exemple, ils expliquent qu’il faut
« utiliser un langage précis, avec des
flèches, pour expliquer au robot ce qu'il doit faire pour se
déplacer dans les labyrinthes ».
Dans l'étude de cas 2, avec des enfants plus âgés et des
adolescents, le formateur utilise également des métaphores pour
expliquer le matériel utilisé. Par exemple, il explique que le
sonar fonctionne « comme une chauve-souris qui envoie des
ultrasons – ceux-ci détectent les obstacles et
reviennent ». Quant au fonctionnement de l'impression 3D des
composants, il explique que « le plastique avec lequel vous
imprimez, c'est l'encre de l'imprimante ». Comme dans
l'étude de cas précédente, les métaphores
utilisées font également référence à des
comportements, des actions qui sont connus pour aider à comprendre
comment la machine fonctionne : « Nous avons programmé
l'ordinateur et tout ce qu'il a à faire, c'est lire sur la carte
où il doit aller », « Nous allons programmer
cette lampe, nous allons lui dire quoi faire ».
4.1.1.2. Dans le discours des apprenants
Les résultats montrent que les apprenants utilisent également
des métaphores qui aident leur compréhension. Dans l'étude
de cas 1, les enfants s’interrogent sur les différents composants,
utilisant parfois des métaphores autres que celles utilisées par
les formateurs. Par exemple, ils s'interrogent sur la mémoire RAM en
utilisant la métaphore d’un bus : « mais
si la RAM n’a pas de roue, comment va-t-elle se
déplacer ? » Les apprenants utilisent
également des métaphores liées à des comportements
et des actions connus : « est-ce qu'elle (la
mémoire RAM) court comme nous ? À la
même vitesse ? », « Il (le robot) ne comprend pas ce que tu dis, il comprend juste ‘avance
d’un pas ».
Dans l'étude de cas 2, les résultats sont similaires. D'une
part, les apprenants utilisent d'autres métaphores que celles des
formateurs : « c'est comme un puzzle ».
D'autre part, ils utilisent également des verbes pour exprimer des
actions et des comportements qui leur sont spécifiques :
« mon robot, quand je lui demande de bouger, il ne bouge
pas », « tu dois lui dire quoi faire quand il
rencontre des obstacles », « tourne, tourne ! », « je dois le programmer pour qu'il écoute ».
4.1.2. La métaphore qui rend tangible
4.1.2.1. Dans le discours du
formateur
Les résultats montrent que les formateurs utilisent des
métaphores dans leur discours pour concrétiser des concepts et
opérations liés au robot. Dans le cas d'étude 1 où
les robots Bee-bot et Blue-bot ont été utilisés, les
formateurs utilisent directement la métaphore de l'abeille dans leurs
instructions pour rendre les robots concrets et manipulables :
« les robots devant vous sont des petites abeilles, une
jaune et une transparente. Elles vont devoir se frayer un chemin dans le
labyrinthe ».
Dans l'étude de cas 2, le formateur utilise des métaphores pour
guider les enfants et les adolescents dans leur assemblage et leur
découverte du robot en leur permettant d'avoir une image concrète
du fonctionnement ou du matériel. Par exemple, le formateur
explique : « un des deux yeux envoie des
vibrations », « c'est la table à
dessin, la table où vous venez déposer tous vos
objets », « voici plusieurs familles de blocs,
plusieurs bibliothèques de blocs ». Le formateur mime avec son corps la façon dont le robot agit pour montrer aux
enfants et aux adolescents comment le robot va tourner :
« vous voyez, voici comment il se comporte ».
4.1.2.2. Dans le discours des apprenants
Les résultats montrent que les apprenants utilisent des
métaphores qui font référence à des mots et des
objets qu'ils connaissent et rencontrent dans leur vie quotidienne. Par exemple,
dans l'étude de cas 1, si les formateurs ont utilisé la
métaphore du livreur pour désigner la mémoire RAM, les
enfants ont dit : « elle ressemble plus à un facteur, c'est comme si elle avait des petites jambes pour aller
vite porter des cartes, des enveloppes ».
Dans l'étude de cas 2, les résultats vont dans le même
sens. Les enfants et les adolescents parlent d'un puzzle lorsqu'ils
assemblent leur robot.
4.1.3. La métaphore qui sert d’accroche
4.1.3.1. Dans le
discours du formateur
Dans les deux études de cas, les résultats montrent la
construction d'un cadre ludique, affectif et imaginaire à travers
l'utilisation de métaphores dans les discours des formateurs.
Dans l'étude de cas 1, ils expliquent aux enfants l'activité de
résolution de labyrinthe en les faisant participer à des
histoires. Par exemple, pour un labyrinthe, les formateurs expliquent :
« La petite abeille doit faire la chasse aux couleurs dans
le labyrinthe, en cherchant la couleur verte, puis bleue (...) et finir par la
couleur violette pour sortir », « c'est un labyrinthe
avec une forêt, un loup et le petit chaperon rouge (...) tu dois
aider le loup à courir jusqu'au Petit Chaperon Rouge (...) et aider le
Petit Chaperon Rouge à arriver chez sa grand-mère plus vite
que le loup ».
Dans l'étude de cas 2, le formateur utilise également des
métaphores dans leur rôle d’accroche pour guider les enfants
et les adolescents dans le montage et la programmation de leur robot en kit.
« Quand vous aurez fini de le programmer, c'est là que
ça sera magique... », « il fait ce
qu'il doit faire. On l'a programmé pour qu'il s'arrête à
l'obstacle. Il aimerait continuer, mais il s'arrête. Si vous ne
voulez pas qu'il le fasse, vous devez le programmer. Vous pouvez lui dire de
faire demi-tour ».
Ce type de métaphore se retrouve également dans le discours du
formateur lorsqu'il fait référence au fonctionnement des robots.
Par exemple, il dit : « je suis attaqué » (en référence à un
robot qui tourne autour de lui), « il est nerveux » (à propos d'un robot qui va vite et tourne
sur lui-même), ou « nous allons faire un chœur de
robots si tous les robots chantent en même
temps ».
4.1.3.2. Dans le discours des apprenants
Dans le discours des apprenants de l'étude de cas 1, les
résultats montrent que les métaphores qui suscitent un cadre
relationnel et une émotion sont fortement présentes. Les enfants
s'accrochent à la famille qui entoure le « petit robot Chaperon Rouge » en expliquant, par exemple :
« elle va chez sa mère et elle se
promène dans la forêt ». Ils utilisent
également les sentiments pour exprimer les actions des robots :
« il est fou », « c'est un petit coquin » (en parlant du
« robot-loup » qui se déplace vers le
mur).
Chez les enfants plus âgés et les adolescents de l'étude
de cas 2, on trouve également dans les discours de nombreuses
métaphores faisant référence aux émotions et aux
sentiments ainsi qu’au cadre ludique : « j’ai tout
mis là, il est content », « il n'est
pas sage... Pourquoi s'arrête-t-il ? »,
« il apprend vite » (admiration),
« il n'arrête pas d'avancer, c'est bien. Il va faire le
tour du monde. (...) Je te jure qu'il fait vroum vroum vroum
vroum ».
Nous assistons également à la création d'une relation
émotionnelle, en particulier lorsque les apprenants parlent à leur
robot ou de leur robot : « le mien aime danser », « attention, tu marches sur mon
robot... le pauvre petit », « je ne suis
pas content (en parlant au robot)... tu dois m'écouter, je
suis ton papa et tu n’as pas de maman »,
« je suis content de toi, petit robot, tu as assez
travaillé pour aujourd'hui », « regarde mon
beau petit robot, il tourne sur lui-même dans sa petite
cage », « ah, il dessine maintenant... c'est mon
petit ».
4.2. Les types
En plus d’être classés selon les rôles
endossés dans le discours, les concepts métaphoriques ont
été classés, dans un deuxième temps, selon leur
type. Trois types de concepts métaphoriques mobilisés à
travers les différents rôles ont été
identifiés : les métaphores spatiales fondamentales, les
métaphores « non vivantes » et les métaphores
« vivantes ».
Les métaphores spatiales sont couramment utilisées pour
représenter les environnements numériques et
révèlent la place particulière des concepts spatiaux dans
notre fonctionnement cognitif fondamental, comme le montrent Lakoff et Johnson (Lakoff et Johnson, 1980).
Elles rendent la technologie numérique concrète et
compréhensible, comme le fait de parler de lieux, de trous ou de
boîtes dans les applications. Par exemple, le formateur de
l’étude de cas 2 fait référence à un
environnement spatial lorsque les apprenants ouvrent l’application de
modélisation 3D : « On arrive sur
l’environnement, l’endroit où on va faire des
dessins en 3D ». Ou encore : « Maintenant vous
effacez tout et revenez vers une table complètement
vide ».
Les métaphores « non vivantes » sont des analogies
avec des objets similaires. Par exemple, l'assemblage est « comme
un puzzle », les éléments sont
« stockés dans une bibliothèque », un
composant est « un bus », etc. Ces métaphores
ou comparaisons permettent souvent de comprendre un fonctionnement, un
environnement ou un élément. En général, dans les
données analysées, elles ne sont pas globales, ne désignent
pas le robot dans son ensemble, mais sont plutôt axées sur des
éléments spécifiques de celui-ci.
Les métaphores « vivantes » sont utilisées
pour rendre certains concepts à la fois compréhensibles, tangibles
et accrocheurs. Dans les données analysées, elles peuvent
être limitées à certains aspects du robot (par exemple, le
sonar fonctionne comme une chauve-souris, la carte mère est un cerveau)
ou être globales (par exemple, le robot est perçu comme un petit
compagnon/animal domestique, ou comme une abeille).
5. Discussion
Dans la lignée des travaux de Lakoff et
Johnson (Lakoff et Johnson, 1980),
les résultats de cette étude exploratoire montrent sans surprise
que les métaphores sont utilisées par les formateurs pour aider
les apprenants à comprendre les composants d'un ordinateur ou d'un robot
et leur fonctionnement. Du côté des apprenants, les
métaphores qu’ils utilisent sont un indicateur de la manière
dont ils les comprennent. Les métaphores permettent aussi aux formateurs
de rendre plus concrets les concepts informatiques et aux apprenants de mieux
les appréhender en les rendant tangibles.
Les résultats les plus intéressants proviennent du rôle
d’accroche et des types de métaphores identifiés. Les
résultats montrent que la machine est perçue comme vivante a
priori, qu'il s'agisse de l'ordinateur ou des différents composants
du robot. Les formateurs et les participants lui ont attribué un
fonctionnement autonome (par ex. : « il peut faire quelque
chose par lui-même ») ou certains sentiments (par ex. :
« il est heureux »). Ces résultats vont dans
le sens de l’animisme décrit par Piaget (Piaget, 1929),
à savoir la propension à attribuer la vie et la conscience aux
objets inanimés. L’intuition animiste des enfants les conduit
à considérer tout objet rencontré comme ayant une
intelligence, une fonction biologique, une intention et une personnalité (Carey, 1987), (Okita et al., 2005),
sans pour autant se demander si cet objet est vivant (Turkle, 1995).
Le moment où le robot commence à bouger exacerbe les
métaphores « vivantes », il « prend
vraiment vie » (par ex. : il « court, danse,
répond, refuse de faire quelque chose, agit mal, » etc.).
Il devient un personnage avec lequel les individus interagissent. Une empathie
se développe envers la machine en mouvement. On peut observer le
rôle que joue la narration (dans les métaphores utilisées
comme accroche) pour renforcer la perception du robot comme un personnage qui
« vit » une histoire. Ce phénomène peut
être observé aussi bien pour les robots « boîte
noire »/humanoïdes que pour les « robots en
kit ». C'est donc plus le mouvement, et, derrière lui,
l’idée d’une autonomie propre, que l'apparence du robot qui
semble favoriser la représentation « vivante » de la
machine.
Le risque des métaphores « vivantes » est une
méconnaissance de la nature des interactions avec le robot et des enjeux
qui y sont liés. Comme le souligne Tisseron (Tisseron, 2015),
au-delà d'un attachement aux objets qui se développe
naturellement, les objets en mouvement tels que les robots
génèrent une empathie émotionnelle et cognitive. Elle
conduit à un transfert entre l'homme et la machine :
« le robot est comme moi et je suis comme le robot ».
Cette représentation « vivante » du robot masque le
fait que la machine n'a pas d'intention propre. Un double déplacement de
l'emplacement de l'intention s’opère alors. Le premier
déplacement fait oublier que le robot et le cadre de l'activité
ont été conçus et mis en place par les formateurs.
L’intention initiale est du côté des formateurs, mais
occultée. Les apprenants sont mis dans un processus créatif et
apparaissent en effet comme les initiateurs (par ex. : « vous
allez créer un robot vous-même », « vous
allez aider l'abeille »). Le deuxième transfert
déplace l'intention des apprenants vers la machine. Le robot acquiert une
autonomie propre et passe du statut d'exécutant des instructions des
apprenants à celui d'agent qui exécute une tâche selon sa
propre volonté. Ce qui est en jeu ici, c’est le fait que ce double
déplacement occulte entièrement les intentions humaines qui se
traduisent dans le robot et son fonctionnement, pour mettre en avant une machine
« vivante » qui opère selon ses propres intentions.
Le risque est dès lors de considérer les intentions du robot comme
« objectives » (allant de soi) et de ne pas pouvoir
questionner la « subjectivité » (les normes et les
valeurs humaines) embarquée dans la machine.
6. Conclusion et travaux futurs
Cet article présente une analyse des discours
tenus par les formateurs et les apprenants lors d’activités
d’initiation à la robotique pour les enfants et les adolescents.
À travers l’exploration des métaphores mobilisées
spontanément, il vise à observer les représentations des
apprenants et leurs interactions avec les robots impliqués dans des
activités éducatives afin de contribuer au développement de
problématiques à aborder dans le cadre d’une
éducation critique à la technologie. Les analyses sont
effectuées à partir de la théorie de la métaphore
conceptuelle (Lakoff et Johnson, 1980).
Si les métaphores reflètent la compréhension du
fonctionnement de la machine par les utilisateurs, elles peuvent en cacher
certains aspects (Tisseron, 2015).
Elles créent alors des attentes, des frustrations et des risques. C'est
à ces aspects que cette étude accorde une attention
particulière.
Elle prend forme à travers deux activités
d’éducation à la robotique. La première
activité a impliqué les robots BeeBot, BlueBot et Ozobot dans sept
classes d'enfants de 3 à 10 ans. La seconde activité consistait en
une formation de cinq demi-journées pour 13 participants de 8 à 15
ans. Ils ont conçu, construit et programmé un robot.
Outre l’identification des types de métaphores utilisées
spontanément et la définition de leurs rôles au sein des
discours, trois points sont plus particulièrement à souligner
parmi les résultats de cette étude. Le premier concerne
l'importance du mouvement et du déplacement considérés
comme « autonomes », soutenus par le récit qui place
le robot dans le rôle d'un personnage (métaphores utilisées
comme accroche). Le mouvement renforce une relation empathique avec le robot.
Deuxièmement, la métaphore vivante masque les aspects
spécifiques de la machine. Elle conduit à des
représentations erronées de son fonctionnement et à des
attentes du « vivant » qui ne sont pas
réalisées. Troisièmement, la métaphore
« vivante » déplace l'intention de l'apprenant,
où le robot est exécutant, vers la machine, où le robot est
un agent, en occultant, d’une part, l'intention du formateur en tant que
concepteur de l'activité ou du modèle de robot et, d’autre
part, l’intention de l’apprenant en tant que producteur et/ou
programmeur du robot.
Ces trois points constituent des problématiques à aborder dans
le cadre d’une éducation critique à la technologie. Ainsi,
il est nécessaire de prendre conscience de la métaphore
« vivante » dans les activités
d’éducation à la robotique. Si la compréhension du
fonctionnement du robot est essentielle, elle ne peut se faire sans
déconstruire les représentations de la machine. L'idée
n'est pas d'éliminer l'utilisation des métaphores, qui ont leur
rôle dans l'éducation et les processus cognitifs de
compréhension, mais d'être précis sur la localisation de
l'intention et la nature de l'autonomie de la machine. Une piste serait de
présenter les robots comme des constructions sociales qui
reflètent des intentions humaines. Des recommandations pourraient
être faites aux formateurs pour les aider à formuler des discours
éclairés sur l'informatique et les concepts liés à
la robotique auprès des enfants.
Pour se faire, cette étude exploratoire devrait être approfondie
non seulement par une analyse plus précise des données
collectées (confrontation des deux cas, prise en compte de
l’âge des apprenants, etc.), mais également par une
augmentation des cas d’étude.
À
propos des auteurs
Fanny Boraita est titulaire d'un doctorat en sciences de
l'éducation. Elle est chargée de recherche permanente et
coordinatrice pédagogique à la Faculté d'informatique de
l'Université de Namur où elle occupe le poste de coordinatrice
pédagogique depuis 2017. Ses intérêts de recherche sont
liés à la pédagogie de l'enseignement supérieur,
à la mise en œuvre et à l'évaluation des dispositifs
et à l'éducation au numérique.
Adresse : Institut IRDENA –
Faculté d’Informatique – Université de Namur –
61, rue de Bruxelles à 5000 Namur (Belgique)
Courriel : fanny.boraita@unamur.be
Anne-Sophie Collard est professeure en sciences de
l'information et de la communication à l'Université de Namur. Elle
dirige l'Unité Communication et Internet du Centre de Recherche
Information, Droit et Société. Ses recherches portent sur la
littératie numérique et médiatique, l'éducation
critique aux technologies et les pratiques collaboratives dans les
environnements de travail numériques.
Adresse : Institut NADI – CRIDS
– Université de Namur – 61, rue de Bruxelles à 5000
Namur (Belgique)
Courriel : anne-sophie.collard@unamur.be
Julie Henry est doctorante à la Faculté
d’informatique de l'Université de Namur. Ses recherches portent sur
la didactique des TIC et de l'informatique, la psychologie de la programmation,
l’éducation au numérique (incluant l’informatique dans
tous ses domaines), ainsi que sur l'éducation à la
citoyenneté numérique.
Adresse : Institut NADI –
Faculté d’Informatique – Université de Namur –
61, rue de Bruxelles à 5000 Namur (Belgique)
Courriel : julie.henry@unamur.be
RÉFÉRENCES
Alexandre,
M. (2013). La rigueur scientifique du dispositif méthodologique
d’une étude de cas multiple. Recherches qualitatives, 32(1), 26-56.
Alimisis, D. (2013). Educational robotics: Open questions
and new challenges. Themes in Science and Technology Education, 6(1), 63-71.
Alimisis, A. D. et Kynigos, C. (2009). Constructionism
and robotics in education. Dans Dimitris Alimisis (dir.), Teacher education
on robotic-enhanced constructivist pedagogical method, (p. 11–26).
ASPETE.
Barr, P., Biddle, R. et Noble, J. (2003). Interface
Ontology: Creating a Physical World for Computer Interfaces. Dans Proceedings
of the 8th European Conference on Pattern Languages of Programms (EuroPLoP '2003), (p. 1-18.).
Bazylev, D., Margun, A., Zimenko, K., Kremlev, A. et
Rukujzha, E. (2014). Participation in robotics competition as motivation for
learning. Procedia-Social and Behavioral Sciences, 152,
835-840.
Benitti, F. B. V. (2012). Exploring the educational
potential of robotics in schools: A systematic review. Computers &
Education, 58(3), 978-988.
Bers, M. U., Flannery, L., Kazakoff, E. R. et Sullivan,
A. (2014). Computational thinking and tinkering: Exploration of an early
childhood robotics curriculum. Computers & Education, 72,
145-157.
Carey, S. (1987). Conceptual change in childhood.
Cambridge, MA: MIT Press.
Collard, A. S. (2012) Apprendre dans un monde virtuel. Document numérique, 71-93.
Collard, A. S. et Fastrez, P. (2010). A model of the
role of conceptual metaphors in hypermedia comprehension [communication]. Cognition and Media (CICOM'09), Santo Domingo.
Collard, A. S., Fastrez, P. et Brouwers, A. (2012).
Convivialité et métaphores dans les interfaces de systèmes
interactifs. Interfaces numériques, 1(3), 471.
Eguchi, A. (2014). Educational robotics for promoting
21st century skills. Journal of Automation Mobile Robotics and Intelligent
Systems, 8(1), 5-11.
Felicia, A. et Sharif, S. (2014). A review on educational
robotics as assistive tools for learning mathematics and science. Int. J.
Comput. Sci. Trends Technol., 2(2), 62-84.
Ferrada-Ferrada, C., Carrillo-Rosúa, J.,
Díaz-Levicoy, D. et Silva Díaz, F. (2020). Robotics from STEM
areas in primary school: A systematic review. Education in the Knowledge
Society, 22, 1-18
Fior, M., Nugent, S., Beran, T. N., Ramirez-Serrano, A.
et Kuzyk, R. (2010). Children’s relationships with robots: Robot is
child’s new friend. Journal of Physical Agents, 4(3),
9–17.
Fridin, M. et Belokopytov, M. (2014). Embodied robot
versus virtual agent: Involvement of preschool children in motor task
performance. International Journal of Human–Computer Interaction,
30(6), 459–469.
Gaudiello, I. et Zibetti, E. (2013). La robotique
éducationnelle : état des lieux et perspectives. Psychologie française, 58(1), 17-40.
Gaudiello, I. et Zibetti, E. (2016). Learning robotics,
with robotics, by robotics: Educational robotics. John Wiley &
Sons.
Henry, J., Hernalesteen, A., Dumas, A. et Collard, A.-S.
(2018). Que signifie éduquer au numérique ? Pour une approche
interdisciplinaire Dans Actes du colloque Didapro 7 – DidaSTIC. De 0
à 1 ou l’heure de l’informatique à
l’école.
Henry, J. et Joris, N. (2013). Maitrise et usage des TIC
: la situation des enseignants en Belgique francophone. Dans B. Drot-Delange, E.
Bruillard et G-L. Baron (dir.) Sciences et technologies de
l’information et de la communication (STIC) en milieu éducatif. Disponible sur internet.
Henry, J. et Joris, N. (2016). Informatics at secondary
schools in the French-speaking region of Belgium: myth or reality? Dans Actes
du colloque The International Conference on Informatics in Schools: Situation,
Evolution and Perspectives (p. 13-24).
Henry, J. et Smal, A. (2018). « Et si demain je
devais enseigner l’informatique ? » Le cas des enseignants
de Belgique francophone. Dans Actes du colloque Didapro 7 – DidaSTIC.
De 0 à 1 ou l’heure de l’informatique à
l’école.
Joris, N. et Henry, J. (2014). L’enseignement de
l’informatique en Belgique francophone : état des lieux. Bulletin de la société informatique de France, 2,
107–116.
Kahn, P. H., Jr., Kanda, T., Ishiguro, H., Frier, N. G., Severson, R. L.,
Gill, B. T., Ruckert, J. H. et Shen, S. (2012). Robovie, you’ll have to go
into the closet now: Children’s social and moral relationships with a
humanoid robot. Developmental Psychology, 48, 303–314.
Kerepesi, A., Kubinyi, E., Jonsson, G. K.,
Magnússon, M. S. et Miklósi, Á. (2006). Behavioural
comparison of human–animal (dog) and human–robot (AIBO)
interactions. Behavioural processes, 73(1), 92-99.
Kory, J. et Breazeal, C. (2014, August). Storytelling
with robots: Learning companions for preschool children's language development.
Dans Proceeding of the 23rd IEEE international symposium on robot and human
interactive communication (p. 643-648).
Kubilinskiené, S., Žilinskienė, I.,
Dagienė, V. et Sinkevičius, V. (2017). Applying robotics in school
education: A systematic review. Baltic journal of modern computing, 5(1), 50-69.
Lambert, D. (2019). La robotique et
l’intelligence artificielle. Fidélité Eds.
Lakoff, G. et Johnson, M. (1980). Metaphors we live
by. University of Chicago press.
Levin, T. et Wagner, T. (2006). In their own words:
Understanding student conceptions of writing through their spontaneous metaphors
in the science classroom. Instructional Science, 34(3), 227.
Ma, Y. et Williams, D. C. (2013). The potential of a
First LEGO League robotics program in teaching 21st century skills: An
exploratory study. Journal of Educational Technology Development and Exchange
(JETDE), 6(2), 2.
Madsen, K. H. (2000). Magic by metaphors. Dans Proceedings of DARE 2000 on Designing augmented reality environments (p.
167-169).
Malinverni, L., Valero, C., Schaper, M. M. et de la Cruz,
I. G. (2021). Educational Robotics as a boundary object: Towards a research
agenda. International Journal of Child-Computer Interaction, 29,
100305.
Malvezzi, M. (2021). Education in & with Robotics to
Foster 21st-Century Skills. Dans Proceedings of EDUROBOTICS 2020. Springer Nature.
Manches, A., McKenna, P. E., Rajendran, G. et Robertson,
J. (2020). Identifying embodied metaphors for computing education. Computers
in Human Behavior, 105, 105859.
Melson, G. F., Kahn Jr, P. H., Beck, A., Friedman, B.,
Roberts, T., Garrett, E. et Gill, B. T. (2009). Children's behavior toward and
understanding of robotic and living dogs. Journal of Applied Developmental
Psychology, 30(2), 92-102.
Moser, K. S. (2000). Metaphor analysis in
psychology—Method, theory, and fields of application. Forum Qualitative
Sozialforschung/Forum: Qualitative Social Research, 1(2).
Okita, S., Schwartz, D., Shibata, T., Nakamura, O. et
Tokuda, H. (2005). Exploring young children’s attributions through
entertainment robots. Dans Proceedings of the 14th IEEE International
Workshop on Robot and Human Interactive Communication (p. 390–395).
IEEE.
Piaget, J. (1929). The child’s conception of the
world. Savage, MD: Littlefield Adams.
Pragglejaz Group (2007). MIP: A Method for Identifying
Metaphorically Used Words in Discourse, Metaphor and Symbol, 22(1), 1–39.
Riek, L. D. et Howard, D. (2014). A code of ethics for
the human-robot interaction profession. Dans Proceedings of We Robot,
2014. Disponible sur internet.
Robinson, H., MacDonald, B., Kerse, N. et Broadbent, E.
(2013). The psychosocial effects of a companion robot: a randomized controlled
trial. Journal of the American Medical Directors Association, 14(9), 661-667.
Romero, M. et Sanabria, J. (2017). Des projets de
robotique pédagogique pour le développement des compétences
du XXIe siècle. Dans M. Romero, B. Lille et A. Patiño
(dir.), Usages créatifs du numérique pour l’apprentissage
au XXIe siècle. Presses de l’Université du
Québec.
Rusk N., Resnick M., Berg R. et Pezalla-Granlund M.
(2008) New pathways into robotics: Strategies for broadening participation. Journal of Science Education and Technology, 17(1), 59-69.
Saariketo, M. (2014). Imagining alternative agency in
techno-society: outlining the basis of critical technology education (EN). Media practice and everyday agency in Europe, 129-138.
Scopelliti, M., Giuliani, M. V., D’Amico, A. M. et
Fornara, F. (2004). If I had a robot at home: Peoples’ representation of
domestic robots. Dans S. Keates, J. Clarkson, P. Langdon et P. Robinson (dir.), Designing a More Inclusive World (p. 257–266). Springer.
Sklar, E., Eguchi, A. et Johnson, J. (2002). RoboCup
Junior: learning with educational robotics. Dans Robot Soccer World Cup (p. 238-253). Springer.
Stone, A. et Farkhatdinov, I. (2017). Robotics education
for children at secondary school level and above. Dans Proceeding of Annual
Conference Towards Autonomous Robotic Systems (p. 576-585). Springer,
Cham.
Sullins, J. P. (2015). Applied professional ethics for
the reluctant roboticist. Dans Proceedings of the 10th ACM/IEEE Conference on
Human-Robot Interaction (HRI2015): The Emerging Policy and Ethics of Human-Robot
Interaction Workshop.
Suto, H. (2013). Robot Literacy: An Approach For Sharing
Society With Intelligent Robots. International Journal of Cyber Society and
Education, 6(2), 139-144.
Tisseron, S. (2015). Le jour où mon robot
m’aimera : Vers l'empathie artificielle. Albin Michel.
Turkle,
S. (1995). Life on the screen: Identity in the age of the Internet. Simon
and. Schuster.
Yin, R. K. (2009). Case study research: Design and
methods, 5. Sage.
Zawieska, K. (2020). Roboethics as a research puzzle.
Dans Proceeding of the14th ACM/IEEE international conference on
human-robot interaction, 2019 (p. 612–613).
1 Les trois autrices ont
contribué à parts égales à cette étude et
sont donc mentionnées par ordre alphabétique.
2 STEM : sciences,
technologies, mathématiques et ingénierie |
