de l´Information et
de la Communication pour
l´Éducation et la Formation
version à télécharger (pdf)
Volume 28, 2021
Article de recherche
Numéro Spécial
Technologies pour l’apprentissage de l’Informatique de la maternelle à l’université
|
Contact : infos@sticef.org |
Manipulations de robots programmables en classe par des élèves de 9-10 ans. Éducation au numérique et culture technique
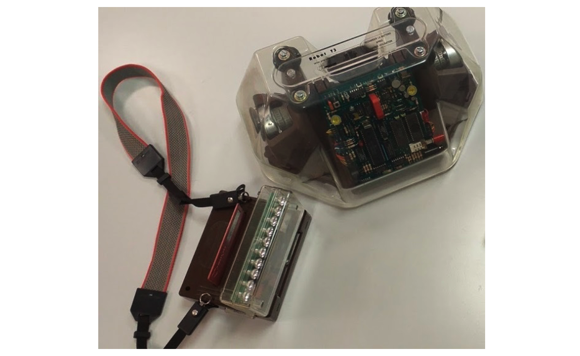
1. IntroductionDepuis 2016, l’apprentissage de l’informatique a pris place dans les programmes d’enseignement de l’école primaire (Vandevelde et Fluckiger, 2020). Devenu enjeu sociétal, cet enseignement vise à éduquer les citoyens en leur donnant les moyens de comprendre les traitements réalisés par les systèmes qu’ils utilisent et à initier chacun à des notions en informatique (Baron et Drot-Delange, 2016). Cette recherche a été réalisée dans le cadre du projet ANR « IEcare» (http://iecare.lip6.fr/), portant sur l’étude de la conception et de la mise en œuvre de scénarios pédagogiques par des enseignants. En France, quelques professeurs des écoles choisissent d’utiliser des robots programmables en vue de faire acquérir des connaissances à la fois en technologie et en informatique aux élèves. Nous présentons dans cet article une étude de cas portant sur l’analyse d’un scénario pédagogique conçu par un enseignant avec deux robots programmables dans une classe de CM1. Après un bref rappel historique concernant l’introduction de robots programmables dans des classes pour des visées d’apprentissage de l’informatique, une comparaison des deux robots BeeBot® et ProBot® utilisés dans cette classe de CM1 permettra d’identifier à la fois les points communs et les différences d’un point de vue technologique. La quatrième partie présente le cadre théorique à partir duquel les questions de recherche seront posées. Une fois la méthodologie développée, les résultats seront exposés avant de terminer sur des discussions et des perspectives de recherche. 2. Des robots programmables dans les classesDepuis 1985 avec la présentation du Plan Informatique pour Tous (IPT) et en faisant suite aux travaux de Papert (Papert, 1980) et d'Harel et Papert (Harel et Papert, 1991), des robots programmables de sol pilotés ont été introduits dans des classes. Ce plan politico-scientifique amorcé dès les années 70 avec des recherches exploratoires en éducation (Baron et Bruillard, 1996) traduit une volonté institutionnelle d’équiper de nombreux établissements scolaires par l’État. Après l’expérience LOGO plusieurs fournisseurs de matériel (Jeulin, Valiant, MB, Swallow...) vont développer des robots de plancher avec des présentations et des caractéristiques variées, comme le montre Greff (Greff, 1999). Certains seront distribués dans les écoles françaises, notamment les tortues T2, T3 et le robot Bigtrak. Les premiers robots diffusés se présentent sous la forme d’un dôme transparent (cf. Figure 1). Ils sont programmables soit par l’intermédiaire d’un ordinateur raccordé à ce robot, soit par l’intermédiaire d’un lecteur de cartes perforées. Cependant, l’approche pédagogique n’est pas toujours intuitive. En effet, comme le soulignent plusieurs chercheurs, (Grugier et Villemonteix, 2017), (Komis et Misirli, 2015), la mise en œuvre des dispositifs expérimentaux en classe n’était pas toujours évidente à cause de la complexité du matériel informatique. En classe, par des actions manipulatoires, les élèves arrivaient à générer des déplacements du robot. Cependant, étaient-ils capables d’analyser le fonctionnement du robot pour faire un lien entre les actions sur ce dernier et les déplacements engendrés ? Difficile à dire puisque les travaux de recherche ne se sont pas intéressés aux questions de compréhension du fonctionnement de ce système constitué du robot, de cartes de programmation et du boitier de transfert. Le robot Bigtrak, représentant un véhicule d’exploration lunaire, disposait d’un pupitre de programmation sur son dos. Par rapport aux robots précédents, il semble plus aisé de générer des déplacements après avoir programmé des instructions. Des expérimentations ont été menées dans des classes avec le Bigtrak comme en atteste un article relatant un projet informatique dans une école maternelle (Allari, 1986). Combes-Trithard (Combes-Trithard, 1984) relate que, suite à l’utilisation de ce robot, les élèves ont développé le repérage dans l’espace, un registre de langage, la rigueur et la capacité à ordonner des informations. Aucune mention n’est faite concernant des difficultés rencontrées par les élèves avec le Bigtrak. Cependant, au regard de la solution retenue pour le programmer, qui est proche des robots contemporains notamment le BeeBot®, il est probable que des jeunes élèves aient pu avoir des difficultés à comprendre la notion de stockage des instructions dans une mémoire difficilement perceptible (Grugier, 2021).
Figure 1 • Le robot T3 (tortue) et son boitier de lecteur de carte et de transfert Trois décennies plus tard, la miniaturisation des composants électroniques a permis de réduire les dimensions des robots tout en proposant un habillage propice à une utilisation scolaire. La robustesse de ces nouveaux robots autorise une manipulation hasardeuse propice à une utilisation dans des classes. De plus, « l’évolution des langages et le développement d’environnements de programmation » (Nogry, 2020) favorise la mise en œuvre de scénarios pédagogiques où les élèves apprennent à contrôler des robots à travers un langage spécifique (Bers et al., 2014), (Komis et Misirli, 2015), (Komis et al., 2017). Ces nouveaux robots laissent supposer une prise en main aisée et une plus grande compréhension du fonctionnement par les élèves. 3. Deux robots : des points communs et des divergencesDans la suite de cet article, nous nous intéresserons à la culture technique pouvant être développée par l’utilisation des deux robots BeeBot® et ProBot® dans une classe de CM1. L’idée de culture technique à l’école obligatoire est « celle d’appropriation de techniques comme composante de toute éducation générale » (Martinand, 2014). L’utilisation de robots programmables nécessite l’appropriation de techniques. Nous identifierons dans un premier temps les points communs et les divergences entre ces deux robots. Pour cela, nous distinguons plusieurs niveaux de connaissances qui peuvent être construites avec ces robots. Nous retenons les quatre niveaux de connaissance de Combarnous : - « la connaissance coutumière - perception est la familiarité avec l'objet, - la connaissance fonctionnelle est la compréhension de la fonction de l'objet, - la connaissance technologique est la connaissance du dessinateur, du monteur, du réparateur qui connaissent avec exactitude tous les éléments de l'objet, - la connaissance raisonnée correspond à une connaissance rationnelle et globale ; elle réunit donc des informations sur la fonction et le but de l'objet, des compréhensions des technicités qu'il renferme dans sa conception comme dans sa réalisation, des observations sur la place de l'objet dans le monde matériel, des réflexions sur son impact sur la société et sur les individus. » (Combarnous, 1984, p. 234-235). La connaissance coutumière et la connaissance fonctionnelle s’inscrivent dans les attentes des programmes scolaires pour un enseignement obligatoire à l’école en France. Par contre, la connaissance technologique et la connaissance raisonnée peuvent être attendues dans le cadre de formations professionnelles spécifiques. Pour identifier les connaissances fonctionnelles, il convient d’abord de clarifier le fonctionnement des robots (Denhière et Baudet, 1992). Ainsi, l’analyse fonctionnelle permet d’identifier les fonctions techniques retenues dans la conception des objets. Les robots BeeBot® et ProBot® se caractérisent par une apparence robuste et ludique dont les déplacements peuvent se programmer par des actions successives sur des boutons situés au niveau d’un pupitre de commande qui est intégré. La fonction principale de ces robots est de pouvoir générer une succession de déplacements à partir d’une séquence composée de plusieurs instructions. Figure 2 • Le robot BeeBot® à gauche et le robot ProBot® à droite Différentes fonctions secondaires sont présentes. Pour chaque fonction, les concepteurs ont choisi différentes solutions techniques. Elles sont parfois identiques pour les deux robots et parfois différentes. Pour ces robots, deux procédures sont à mettre en œuvre avant de pouvoir générer un déplacement. La première consiste à actionner les interrupteurs positionnés sous le robot. L’un permet d’agir sur le circuit électrique pour l’alimentation en énergie des organes de commandes et le second commande le circuit électrique alimentant le buzzer pour l’émission des sons. La seconde procédure consiste à programmer avec l’interface une séquence d’instructions en appuyant successivement et dans un ordre défini sur les boutons du clavier. La comparaison des solutions techniques retenues pour répondre aux fonctions montre de nombreuses similitudes, notamment les modes de déplacements des robots sur le sol et les procédures de programmation. Ainsi, de nombreux points communs sont présents entre ces deux robots, ce qui permet d’émettre l’hypothèse suivante : après avoir découvert et généré un programme de déplacement avec un BeeBot®, un élève peut appréhender le ProBot® pour ensuite générer un programme de déplacement. Cependant, des solutions techniques différentes sont présentes entre le robot BeeBot® et le ProBot@ pouvant soulever des difficultés dans l’appropriation. Le ProBot@ offre la possibilité de définir la longueur du pas de déplacement ainsi que l’angle de rotation. De plus, les lignes d’instructions du programme sont affichées sur un écran offrant la possibilité de les modifier (cf. Tableau 1). Il est également possible de programmer des boucles pour répéter des séquences d’instructions. Tableau 1 • Différentes solutions techniques choisies pour répondre aux fonctions techniques entre les deux robots
Contrairement à de nombreux travaux (De Michele et al., 2008), (Highfield et al., 2008), (Komis et Misirli, 2012), nous ne nous intéressons pas à analyser le rôle de ces robots dans le développement, chez les élèves, de capacités de résolution de problèmes, de raisonnement logique ou encore de numération mais à analyser les schèmes élaborés par les élèves pour appréhender le fonctionnement du robot BeeBot® puis du ProBot®. Ainsi, quelles sont les capacités d’action et les connaissances fonctionnelles développées par des élèves de début de cycle 3 concernant le fonctionnement du robot BeeBot® ? Ces capacités et connaissances fonctionnelles sont-elles transposables pour prendre en charge un autre robot programmable plus complexe du point de vue des solutions techniques proposées ? 4. Cadre théorique pour analyser les activités des élèvesL’introduction de robots programmables dans des classes du primaire favorise la construction d’une éducation au numérique (Baron, 2018) et à la technologie. Cette éducation permet, par la présence de technologie, l’acquisition d’une expérience informatique avec pour enjeu, comme le précise Bruillard (Bruillard, 2016), « de commencer à maitriser une technologie de travail : développer également des capacités d’action sur le monde et de compréhension de ce monde, des valeurs autour du travail individuel et collectif ». Ainsi, la construction d’une éducation au numérique ne peut se réduire à de la programmation. L’éducation au numérique est une structure composée de trois ensembles, science de l’informatique, culture technique, culture citoyenne, qui selon Baron (Baron, 2018) forment différentes interactions. C’est la culture technique et les capacités d’action développées dans un milieu spécialement aménagé pour la rencontre avec les robots qui sont questionnées dans cet article. L’analyse de séquences pédagogiques mises en place avec les robots, par des enseignants peu ou pas formés à un enseignement de l’informatique met en jeu à la fois des contenus en informatique (séquence d’instructions, programmation) et en technologie (comprendre le fonctionnement de l’objet, identifier les actionneurs) comme le montre Grugier et Nogry (Grugier et Nogry, 2021). Ces objets ont un double statut (Lebeaume, 2019) : objet pour apprendre des notions de programmation et objet à apprendre (c’est-à-dire apprendre son fonctionnement pour agir efficacement). Grugier et Nogry (Grugier et Nogry, 2021) ont montré que les séquences pédagogiques mises en place en classe sont constituées de deux phases. La première phase est centrée sur la découverte du fonctionnement du robot et la seconde sur l’utilisation et la programmation. Lors de la première phase, les élèves déploient des aptitudes pour comprendre le fonctionnement et résoudre les problèmes rencontrés avec les robots. Ce caractère technique est selon Combarnous, la technicité. « La technicité résulte de la réunion et de l’interaction permanente de trois composantes : - une composante d’apparence philosophique, la rationalité dans sa forme particulière de réflexion technique, - une composante d’apparence matérielle, l’emploi d’engins, comme intermédiaire entre des volontés et des actions, - une composante d’apparence sociologique, les spécialisations des individus et des groupes d’exécution de tâches coordonnées » (Combarnous, 1984, p. 22-23). Attardons-nous sur la notion d’engin utilisée par Combarnous. C’est une notion qui englobe à la fois des outils, des machines et des équipements. Elle fait référence au monde industriel lié à la production. Pour notre part, nous emploierons parfois le terme « d’objet technique », en référant à des solutions techniques retenues dans la conception, et également le terme d’artefact avec ses contraintes et ses spécificités qui sont à comprendre et à appréhender. La rencontre, en classe, avec un robot programmable/un artefact, conduit l’enfant à développer un raisonnement empirique pour prendre en charge et mener des actions sur ce dernier en fonction du scénario pédagogique élaboré par l’enseignant. L’enfant s’adapte aux spécificités du robot, pour générer un programme. Le robot influence les activités de l’enfant de par les contraintes qu’il impose. En classe, les moments scolaires proposés autour de la découverte du fonctionnement des robots peuvent être collectifs ou individuels. Comme le précise Hatano (Hatano, 1990), les apprentissages se font au quotidien par des pratiques, par de l’observation de pratiques et par le langage. Une des spécificités de la manipulation et de la découverte d’un robot en classe est l’organisation sociale mise en œuvre par l’enseignant. Au cours des activités de raisonnement, de manipulation, d’échanges, l’enfant élabore des représentations sur le fonctionnement de l’artefact mis à disposition. Selon Nogry et al. (Nogry et al., 2013), l’approche instrumentale développée par Rabardel (Rabardel, 1995) offre un cadre d’analyse pour décrire le schème d’utilisation d’un artefact, comme les robots programmables BeeBot® et ProBot®, dans la durée. L’approche instrumentale « offre un cadre conceptuel pertinent pour étudier la façon dont l’introduction d’une technologie induit (...) une transformation de l’activité de l’utilisateur » (Rabardel et Bourmaud, 2003, p. 11). En classe, le robot programmable devient un instrument une fois associé à des schèmes d’utilisation. Un schème se définit selon Nogry comme une « organisation invariante de l'action réalisée dans un objectif visé » (Nogry, 2020, p. 4). Les schèmes constituent des outils qui permettent au chercheur de modéliser les relations entre le geste et la pensée élaborée par les élèves (Rabardel, 1995). Les schèmes d’utilisation se mettent en place progressivement à travers les moments scolaires proposés par l’enseignant. En référence aux deux premières composantes de la technicité de Combarnous (Combarnous, 1984), ces moments scolaires sont de nature technique lorsque les élèves cherchent à identifier la chaine de fonctionnement d’un artefact à travers des tâches nécessitant une réflexion technique pour atteindre un objectif visé par l’enseignant. Nous supposons que l’enfant modifie son activité et que des schèmes d’utilisation se construisent par la manipulation de l’artefact et la découverte progressive des propriétés de ce dernier. Ainsi, l’approche instrumentale est retenue pour appréhender le schème d’utilisation d’une technologie en situation et la technicité permet d’identifier des moments scolaires de nature technique par la présence d’artefacts en classe et la rationalité déployée pour les utiliser. Quels sont les indicateurs observables pouvant être retenus pour définir un schème d’utilisation ? En reprenant nos travaux pour l’analyse de l’activité des élèves de maternelle (Grugier, 2021) et une partie des travaux de Spach (Spach, 2017), l’analyse de l’activité des élèves se fait au travers de deux axes. L’un centré sur les processus élaborés par les élèves avec le robot (les gestes, les actions sur les boutons, les traces écrites des élèves, les discours) et l’autre, sur l’observation des mouvements des robots programmables suite aux actions des élèves. La réflexion et la succession des actions dans un ordre défini sur les boutons d’un robot programmable caractérisent le processus mis en œuvre. Le schème d’utilisation est considéré comme en place lorsqu’un élève met systématiquement en œuvre un processus permettant d’atteindre un même objectif visé. Le cadre théorique ainsi développé, nous posons les questions de recherche suivantes : - Quels sont les schèmes d’utilisation qui se construisent, pendant les moments scolaires de nature technique et restent disponibles dans la durée ? - Quels sont les processus mis en œuvre par les enfants avec ces robots programmables, qui leur sont peu familiers ? - Quels sont les schèmes transférables pour la mise en œuvre d’un robot programmable plus complexe de par les solutions techniques choisies ? Dans les lignes suivantes sont présentées la méthodologie élaborée pour apporter des réponses aux questions posées. 5. Méthodologie mise en œuvreCinq séances d’une heure et trente minutes étalées sur cinq semaines, ont été consacrées à la découverte et à la manipulation du robot BeeBot® et du robot ProBot® dans une classe de CM1 de l’académie de Paris. La séquence pédagogique, décrite ci-après, a été mise en place pendant la troisième période de l’année. L’école de cette classe de CM1 est intégrée à un Réseau d’Éducation Prioritaire (REP). Les élèves sont majoritairement issus de catégories socio-professionnelles défavorisées et ne disposent pas chez eux de robots programmables. Néanmoins, durant les deux premières périodes de l’année scolaire, les élèves ont découvert des notions de programmation à partir de tablettes tactiles et de l’application Scratch Junior. Ainsi, les notions de programme, de déplacement, de codage ont été explorées. 5.1. Séquence pédagogique proposée aux élèvesCette séquence pédagogique s’est déroulée en trois phases. La première, découvrir le fonctionnement du robot BeeBot® (séances 1 et 2), la seconde programmer le BeeBot® (séances 3 et 4) et la dernière découvrir le fonctionnement du robot ProBot® (séance 5). L’objectif de la première phase était l’identification des fonctions des organes de commande. L’objectif de la seconde était d’amener les élèves à définir puis programmer une séquence d’instructions afin que le robot se déplace sur un parcours linéaire puis sur un parcours constitué d’obstacles à contourner. Lors de la dernière phase, l’objectif consistait à identifier les fonctions des organes de commande du robot ProBot® et à programmer un déplacement. L’enseignant est intervenu auprès des différents groupes afin de s’assurer que chacun puisse découvrir les robots. La démarche pédagogique de l’enseignant laisse une place forte à l’investigation à travers la manipulation et l’expérimentation effectuées par les élèves. Pour cela, des groupes de 3 à 6 élèves ont été constitués. Pour chaque groupe, un robot était mis à disposition. Pendant les moments en classe, le chercheur n’est pas intervenu auprès des élèves. 5.2. Protocole de recueil des donnéesLe chercheur a filmé les élèves pendant les moments de manipulation du robot dans les groupes et pendant les échanges avec l’enseignant en classe entière. Cette classe n’étant pas équipée de robots, ces derniers ont été introduits par le chercheur. Ainsi, les élèves ne les avaient pas rencontrés auparavant. Les groupes d’élèves ont été constitués par l’enseignant mais pas spécifiquement pour ces moments scolaires sur les robots. Il s’agissait de ne pas introduire des variables supplémentaires notamment au niveau des rituels. L’analyse des vidéos permet de relever les actions et les échanges pendant les moments où les élèves manipulent et échangent entre eux sur le fonctionnement des robots. Dans ce corpus vidéo, nous avons cherché à identifier des traces traduisant la construction de schèmes d’utilisation à travers les processus élaborés et développés par des élèves, en nous focalisant sur leurs gestes tout au long des différentes séances. 5.3. Composition du corpusSeuls les extraits des vidéos contenant des moments scolaires de nature technique avec la présence d’un robot dans les groupes d’élèves ont été retenus. Les vidéos ont été découpées à l’aide du logiciel Movie Maker pour se concentrer sur les gestes des élèves et la chronologie de ces derniers dans la manipulation des robots. Par une collecte inductive à partir du visionnage des traces de constructions, des processus mis en œuvre ont été recherchés. Le corpus (cf. Tableau 2) est ainsi composé de capsules vidéo contenant des moments scolaires de nature technique avec des élèves qui manipulent les robots ou échangent sur les robots en classe. Afin de répondre à la problématique de ce travail de recherche, la durée des capsules vidéo peut varier entre quelques secondes (17s) et plusieurs minutes (9min). Tableau 2. Capsules vidéo constituant le corpus
5.4. Protocole d’analyse des donnéesLes composantes de la technicité permettent de caractériser les moments scolaires de nature technique et l’approche instrumentale d’analyser les activités des élèves dans ces moments. Partant de ce cadre, une grille d’analyse, permettant de relever les processus mis en œuvre pour atteindre les objectifs visés dans les moments scolaires de nature technique, a été élaborée (cf. Tableau 3). Tableau 3 • Exemple d’une grille d’analyse de l’activité des élèves pendant les moments scolaires de nature technique
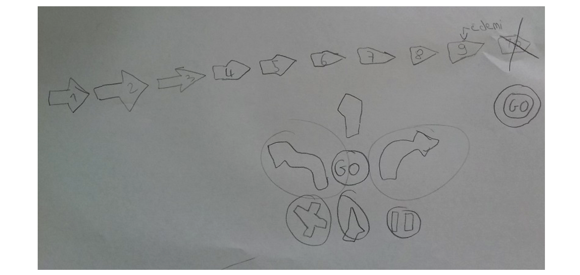
La section qui suit examine les schèmes d’utilisation des élèves qui se construisent dans un environnement aménagé (la classe). Cette approche se fonde sur une analyse d’une succession de séances durant lesquelles les processus manipulatoires se mettent en place et peuvent se modifier. Pour cela, la première partie consistera à présenter l’analyse du corpus par une approche chronologique des séances vécues par les élèves. Dans une seconde partie, une analyse comparative des processus manipulatoires développés avec les deux robots sera effectuée. Cette analyse est présentée par un texte en italique afin de mieux appréhender le contenu. 6. Schèmes d’utilisation élaborés par les élèves6.1. Construction d’un schème d’utilisation pour allumer et programmer le robot BeeBot®L’analyse de l’activité des élèves lors de la première phase met en évidence la mise en place d’une réflexion pour permettre de mettre en fonctionnement le robot BeeBot®. Les élèves doivent découvrir comment fonctionne ce nouvel objet. Dans les groupes, les élèves ouvrent l’emballage dans lequel se trouvent le robot, la notice d’utilisation et le cordon d’alimentation. Certains élèves regardent la notice pendant que d’autres manipulent le robot. Après une vingtaine de secondes, l’observation et la manipulation du robot ont permis d’identifier la présence de deux interrupteurs placés sous le BeeBot®. La notice est rapidement abandonnée pour se concentrer sur le robot et les voyants lumineux. Dans les secondes qui suivent (pour certains groupes, 4s après avoir actionné les interrupteurs), les élèves appuient sur les 4 boutons de direction puis sur le bouton « GO ». Le robot se déplace en roulant sur la table. Pour la suite de cette première séance, c’est principalement le bouton « GO » qui est utilisé pour générer le déplacement du robot. Pour effacer la programmation, dans un premier temps, les élèves pensent qu'il faut éteindre le robot. Après deux tentatives, cette hypothèse n’est pas retenue. Dans un second temps, ils disent qu'il faut appuyer sur le bouton « X » (effacer). L’objectif de cette première séance est rappelé par l’enseignant lors du moment de bilan : « qu’est-ce que vous avez compris du fonctionnement de ce robot ? ». Immédiatement, un élève dit avoir remarqué que le robot à une mémoire. Une autre élève ajoute qu’il y a une mémoire car lorsque l’on appuie sur les boutons orange et puis sur GO, « il (le robot) répète, il se souvient de ce qu’il fait ». Cette première rationalité technique sur le fonctionnement du robot BeeBot® est nécessaire pour pouvoir interpréter les déplacements et les associer aux actions sur le pupitre de commande. La classe pense également que les boutons orange servent à « faire bouger » le robot. Comme le disent les élèves « quand on appuie sur le bouton vers la droite, il va à droite ». Pour un autre élève, « il faut aussi appuyer sur GO pour avancer ». Ces élèves ont également identifié la fonction du bouton pause. Pour cette classe, ce « bouton bleu permet d'arrêter le déplacement pendant 1s ». Un schème d’utilisation se met en place avec la mise en œuvre d’un processus pour d’une part mettre en fonctionnement le robot et d’autre part programmer un déplacement du robot. À la fin de cette première séance, les fonctions des différents boutons semblent identifiées cependant, la construction d’un processus pour programmer le robot ne sera stabilisée qu’à la fin de la seconde séance. Le processus mis en œuvre par les élèves consiste à agir sur les deux interrupteurs placés sous le robot puis à mettre en action la séquence d’instructions suivante : bouton effacer, boutons de direction orange, bouton « GO ». Les élèves vont ainsi générer des déplacements et identifier par la suite la longueur d'un pas de déplacement du robot. Pour cela, un autre artefact est introduit par l'enseignant. Il s’agit de la règle scolaire de mesure. Cet étayage proposé par l’enseignant guide (Bruner, 1983) la pratique des élèves non pas dans la compréhension du fonctionnement du robot mais dans l’activité des élèves, en introduisant une procédure à suivre avant de programmer. Ainsi, le crayon et la feuille de papier sont utilisés pour représenter une séquence d’instructions (cf. Figure 3) reprenant une représentation graphique des boutons du pupitre de commande.
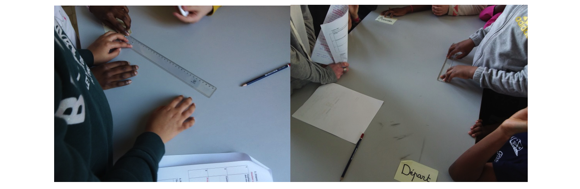
Figure 3 • Trace d’une séquence d’instructions permettant de programmer un BeeBot® pour un déplacement rectiligne Cette représentation d’une séquence d’instructions, sur la figure 3, permet d’observer des traces d’une réflexion technique dans la programmation du BeeBot®. En effet, les élèves devaient programmer le déplacement du robot afin qu’il se déplace sur toute la longueur d’une table. Après avoir relevé qu’un pas du robot était de 15cm, les élèves ont tracé sur le plateau de la table des repères tous les 15cm. Ils en ont déduit qu’il fallait que le robot se déplace de 9,5 pas. Cependant, la conception du BeeBot® n’autorise pas la programmation d’un demi-pas. L’observation du fonctionnement du robot a donc conduit les élèves à programmer le robot de 10 pas puis de 9 pas. La phase de découverte par la manipulation a permis aux élèves d’élaborer une procédure pour allumer le robot. Elle a également permis une amorce de construction d’une procédure permettant de générer des déplacements. Le passage par une représentation graphique de la séquence d’instructions a permis aux élèves d’apporter des corrections au programme suite à la découverte des caractéristiques de déplacement du robot. 6.2. Programmer efficacement le robot BeeBot®Lors de la troisième séance, les élèves sont conviés à programmer le robot afin qu'il se déplace d'un point de départ jusqu'à un point d'arrivée. Sur les tables, deux repères papier (post-it) sont positionnés, un pour matérialiser le point de départ et l’autre, le point d’arrivée. Les élèves utilisent un crayon et du papier pour planifier le programme à implémenter. Des mesures de distances sont effectuées pour définir le nombre de pas nécessaires. Les post-it n’étant pas positionnés à des longueurs liées à un multiple de pas du robot BeeBot®, plusieurs stratégies se mettent en place, de manière à faire en sorte que ce dernier arrive soit à côté du point d’arrivée soit dessus. La réflexion menée consiste à atteindre l’objectif visé tout en prenant en compte les contraintes de fonctionnement du robot. Ceci conduit à des ajustements dans l’écriture d’une séquence d’instructions et à des modifications dans la programmation. Plusieurs itinéraires étant possibles, des stratégies différentes se mettent en place : se déplacer en ligne droite ou effectuer plusieurs virages (cf. Figure 4).
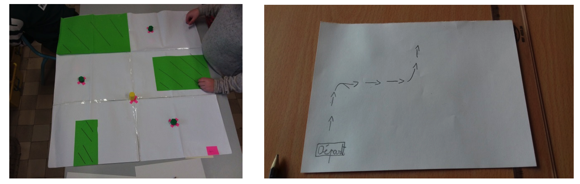
Figure 4 • Mesurer des distances pour définir un nombre de pas Lors de la quatrième séance, l’objectif est de programmer le robot afin qu’il se déplace d’un point à un autre tout en évidant des obstacles (cf. Figure 5).
Figure 5 • Identification d’un itinéraire et représentation d’une séquence d’instructions de déplacement Le schème d’utilisation élaboré lors des séances précédentes reste identique avec le processus : effacer, flèches de direction et « GO ». Pour générer un déplacement, différentes stratégies sont mises en œuvre : identifier le nombre de pas à l'aide d'une règle, puis programmer et écrire la séquence d’instructions sur une feuille. Ainsi, pour certains, il s’agit d’une programmation pas à pas avec un déplacement du robot sur la table au fur et à mesure, pour d’autres des sous-programmes sont testés puis validés avant de passer au sous-programme suivant et enfin, certains élaborent la séquence d’instructions complète. Ces différentes stratégies ont déjà été observées, notamment par Komis et Misirli (Komis et Misirli, 2015), lors de la mise en œuvre d’un scénario pédagogique auprès d’enfants de 4 à 6 ans. Ces différentes stratégies sont liées, également, aux caractéristiques techniques du robot BeeBot®. En effet, l’impossibilité de visualiser les lignes de programmation du robot et de modifier un programme existant conduit les élèves à essayer plusieurs fois la programmation d’une même section de parcours. De plus, chaque erreur sur les boutons du pupitre nécessite une nouvelle programmation. Ceci est d’autant plus vrai que le parcours est complexe. 6.3. Construction d’un schème d’utilisation pour le robot ProBot®Lors de la dernière séance, chaque enfant devait allumer et programmer le robot ProBot® pour que ce dernier se déplace en formant des figures rectangulaires. Les élèves utilisent le même processus qu’avec le BeeBot® pour prendre en charge ce nouveau robot. Ils retournent le robot pour agir sur les deux interrupteurs. Par la suite, le processus de programmation qui consiste à appuyer sur la succession des touches « effacer-flèches-GO » est utilisé, comme en attestent les échanges verbaux dans un groupe d’élèves : - Élève 1 : « C'est où effacer ? » - Élève 2 : « Il faut peut-être appuyer sur menu ? » - Élève 3 : « Maitresse, c'est en anglais » (La touche effacer est baptisée « clear » par les concepteurs du robot.) Le processus doit être adapté à ce nouvel artefact. Il apparait par la suite une réflexion technique pour découvrir le fonctionnement du ProBot®. Ainsi, les enfants agissent sur les boutons représentant des flèches de déplacement puis sur « GO ». Le robot se déplace. Après ces premières découvertes, les investigations se poursuivent vers les fonctions des autres boutons du pupitre de commande. Après de 2 à 3 minutes de manipulation, les élèves découvrent qu'il y a des instructions sur l'écran. Certains pensent qu'il s'agit du « programme qui est déjà fait ». L’investigation du ProBot® se poursuit, jusqu’à la fin de la séance en s’attardant sur les fonctions des boutons de commande et sur les effets qu’ils produisent sur le robot. Cependant, les fonctions de chaque bouton ne pourront pas être explorées pendant cette séance. L’analyse fonctionnelle mise en place par les élèves consiste à agir sur un bouton et observer l’effet produit sur le robot. Les boutons qui sont similaires au BeeBot® sont explorés en premier. L’affichage des lignes d’instructions sur l’écran du ProBot® apporte une lisibilité et permet aux élèves de mieux associer les actions sur les boutons et les effets sur le robot. L’analyse de l’activité des élèves durant les deux premières séances de manipulation et de découverte du robot BeeBot® met en évidence un schème d’utilisation avec la mise en place de deux procédures permettant de mettre en fonctionnement le robot et de le programmer. De plus, l’investigation menée par les élèves permet de développer une réflexion technique sur l’objet qui est transférée pour comprendre le fonctionnement du second robot, le ProBot®. Certaines similitudes de conception entre les deux robots (pupitre de commande avec des boutons remplissant les mêmes fonctions, mode de déplacement sur le sol...) facilitent la prise en main du second par les élèves. De ce fait, il persiste l’idée que la programmation d’un déplacement du robot ProBot® se fait uniquement à partir des flèches de direction comme sur le BeeBot®. Les élèves ne prennent pas en compte la possibilité de modifier la longueur d’un pas de déplacement. Ils ne sont pas dans une stratégie de programmation en explorant plusieurs possibilités mais dans une stratégie de mise en mouvement et de déplacement du robot. Par contre, le changement de dénomination de la touche « effacer » désoriente les élèves. 7. Discussions et perspectivesCette dernière partie de l’article est l’occasion de revenir sur les questions de recherche posées et de discuter des résultats présentés précédemment. L’analyse des vidéos de moments scolaires avec la présence de robots programmables permet de repérer la présence d’une élaboration de schème d’utilisation par des enfants de 9 et 10 ans. Les processus d’actions mis en œuvre par les élèves pour utiliser les robots programmables sont des traces d’une construction mentale développée pour une utilisation rationnelle. Le repérage des gestes des élèves et des échanges dans des moments scolaires ont mis en évidence l’apparition d’un schème d’utilisation qui a été transféré d’un objet technique vers l’appropriation d’un nouveau. 7.1. Développement d’un schème d’utilisation avec le robot BeeBot®Les élèves de cette classe de CM1 découvrent après quelques secondes d’investigation la présence de deux interrupteurs, placés sous le robot BeeBot®. L’action sur les deux organes de commandes va leur permettre de prendre en charge le robot. Ce processus devient immédiatement une pratique systématique qui ne sera pas remise en question par la suite. Pousser les interrupteurs pour ouvrir ou fermer le circuit électrique ne soulève aucune difficulté pour une utilisation du robot même si les fonctions de ces deux organes de commande ne sont pas discutées en classe. De même, la présence de deux interrupteurs, et non d’un seul, pour allumer le robot ne soulève pas de débat dans cette classe. En reprenant Combarnous (Combarnous, 1984), il s’agit d’une connaissance coutumière qui s’est construite et non d’une connaissance fonctionnelle. Dès la fin de la deuxième séance, le processus consistant à appuyer sur les touches « effacer-flèches-GO » se met en place pour programmer le robot BeeBot®. Ce processus ne peut être dissocié des contraintes techniques de ce robot. L’appropriation du robot s’est effectuée après une analyse fonctionnelle de chaque bouton du pupitre de commande. Le repérage des fonctions a permis d’identifier la présence d’une mémoire ne permettant pas de modifier un programme et nécessitant d’appuyer sur le bouton « effacer » pour en réaliser un nouveau. Ainsi, la manipulation, l’observation et les échanges dans la classe à la fin des séances, ont permis aux élèves de développer une capacité d’analyse en identifiant les boutons et les interrupteurs de commande. De plus, les actions sur les boutons du pupitre dans un ordre précis démontrent la construction du concept de séquence d’instructions. 7.2. Développement d’un schème d’utilisation avec le robot ProBot®Les processus manipulatoires développés par ces élèves avec le robot BeeBot® ont été déployés pour une appropriation du robot ProBot®. Ainsi, les deux interrupteurs positionnés sous ce dernier sont actionnés rapidement, permettant de le mettre en fonctionnement. Le processus consistant à actionner successivement les boutons « effacer », « flèches » puis « GO » est mis en œuvre. Cependant, la présentation du pupitre de commande du robot ProBot® diffère du BeeBot®. Les élèves recherchent donc le bouton effacer qui est baptisé « clear ». En recherchant ce bouton permettant d’effacer un programme de la mémoire, l’investigation conduit les élèves à identifier la présence de lignes de programme qui apparaissent sur l’écran. Une analyse fonctionnelle se met alors en place pour faire un lien entre les actions sur les boutons et les instructions qui apparaissent sur l’écran. 7.3. Culture technique avec des robots programmablesCes résultats tendent à montrer que l’introduction d’un artefact nouveau dans une classe conduit les élèves à acquérir une culture technique. Cette culture ne se réduit pas à des actions sur des boutons de commande d’un artefact, elle est également intellectuelle. L’élève se familiarise avec l’artefact pour se l’approprier, l’intégrer, le comprendre. L’artefact guide et oriente la réflexion technique nécessaire à son appropriation de par ses spécificités et de par sa conception. La rationalité technique s’inscrit sur deux niveaux. Le premier concerne la construction et l’installation d’un schème d’utilisation pour l’appropriation de l’artefact et le second dans la démarche mise en place pour rechercher et caractériser les fonctions des différents organes de commande de l’artefact. Le premier conduit à définir une utilisation principalement centrée sur l’artefact lui-même, avec ses spécificités, alors que le second conduit au développement d’une démarche d’appropriation adaptable pour la compréhension d’artefacts non familiers. Cette réflexion sur l’artefact, sur son usage, sur son fonctionnement, sur son appropriation, constitue les prémisses de l’acquisition d’une culture technique. Néanmoins, la question de la construction d’une culture technique, en reprenant Séris (Séris, 1994), n’est pas que technique. Elle ne se réduit pas à l’acquisition de procédures. Car le rôle de l’école est de permettre un accès à une rationalité technique permettant d’« optimiser l’accession aux techniques actuelles, voire aux techniques imminentes et futures » (Séris, 1994, p. 147). La découverte d’objets techniques, par la manipulation libre dans un contexte scolaire avec une organisation en équipe, contribue à l’élaboration d’un schème d’utilisation visant à s’intéresser au fonctionnement des différents organes qui constituent l’objet. Les résultats montrent que l’analyse fonctionnelle permet aux élèves de s’approprier ensuite des objets plus complexes sans dépendre d’une démonstration de l’enseignant. Ceci est un résultat important qui montre la capacité des élèves à s’interroger sur le fonctionnement d’artefacts nouveaux et ensuite à se les approprier. L’analyse fonctionnelle mise en place, dans cette classe, consiste à agir sur les boutons de commande et à observer les actions engendrées sur les actionneurs. Cependant, la construction d’un schème d’utilisation avec le premier robot a limité l’investigation des élèves pour la découverte de nouvelles fonctions disponibles avec le second artefact. Les élèves se limitent à utiliser les boutons en commun sur les deux robots sans approfondir les autres boutons. 7.4. PerspectivesD’autres études seraient à mener pour analyser l’appropriation des robots programmables par les élèves. Les robots programmables permettent aux élèves de s’interroger sur leur fonctionnement et leur utilisation. La manipulation collective contribue à la construction de schèmes d’utilisation mais pas seulement. Elle permet également la construction d’une culture technique comme composante d’une culture générale. Deux axes de recherche sont à développer. Le premier concerne l’appropriation des artefacts par les élèves dans une démarche collective. Il serait intéressant d’explorer l’impact des rôles occupés (troisième composante de la technicité selon Combarnous (Combarnous, 1984) par les élèves dans les moments scolaires sur la construction d’une culture technique. Dans les moments scolaires de groupe, où certains élèves manipulent et d’autres observent, les activités ne sont pas toujours les mêmes. Ces différences dans les activités conduisent-elles à la construction d’une culture technique identique ? Le deuxième axe est en lien avec le choix des artefacts mis à disposition des élèves. Différents fournisseurs de matériel pédagogique proposent des robots de plancher programmables. Le choix, pour un enseignant, d’un robot n’est pas neutre. Au-delà des couleurs, des formes et de la constitution (avec la présence de capteurs ou non et les solutions techniques retenues pour le programmer etc.) les robots vont permettre aux élèves de se construire des schèmes d’utilisation différents. Ainsi, quel est l’impact du choix des artefacts sur les apprentissages ? Le travail est à poursuivre tant sur l’analyse des activités des élèves dans la prise en charge d’artefacts que sur celle des enseignants dans le choix de ces derniers.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Référence de l'article :Olivier GRUGIER, Manipulations de robots programmables en classe par des élèves de 9-10 ans. Éducation au numérique et culture technique, Revue STICEF, Volume 28, numéro 3, 2021, DOI:10.23709/sticef.28.3.7, ISSN : 1764-7223, mis en ligne le 31/03/2022, http://sticef.org |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


© Revue Sciences et Techniques de l'Information et de la Communication pour l'Éducation et la Formation